
The purpose of this post is to review the classical theory of rigid body dynamics by working through a few illustrative problems in that regard.
Problem #\(1\): What defines a rigid body? What is an immediate corollary of this?
Solution #\(1\): A rigid body obeys \(|\textbf x_i-\textbf x_j|=\text{const}\) for all pairs of points \(i,j\) comprising the rigid body. As an immediate corollary, it follows that:
\[\frac{d}{dt}|\textbf x_i-\textbf x_j|^2=0\]
Writing \(|\textbf x_i-\textbf x_j|^2=(\textbf x_i-\textbf x_j)\cdot (\textbf x_i-\textbf x_j)\) and using the product rule leads one to an orthogonality criterion between the relative positions and velocities in a rigid body for all time:
\[(\textbf x_i-\textbf x_j)\cdot(\dot{\textbf x}_i-\dot{\textbf x}_j)=0\]
Mathematically, this suggests that there should exist a single, universal vector \(\boldsymbol{\omega}\) called the angular velocity vector of the rigid body such that for all pairs \(i,j\) in the rigid body, one has:
\[\dot{\textbf x}_i-\dot{\textbf x}_j=\boldsymbol{\omega}\times(\textbf x_i-\textbf x_j)\]
Existence is always guaranteed, but one can find loopholes around uniqueness, e.g. the following rigid body consisting of a bunch of collinear point masses moving together with identical velocities \(\dot{\textbf x}_i=\dot{\textbf x}_j\) would admit any angular velocity \(\boldsymbol{\omega}\) along the line of their collinearity.

But in general, such situations never arise and so \(\boldsymbol{\omega}\) is unique at all times \(t\) (would be nice to obtain a rigorous proof of this intuition).
Problem #\(2\): How is the angular momentum \(\textbf L_{\textbf X}\) about a point \(\textbf X\) defined? What would it mean for \(\textbf X\) to be “fixed in some body frame” of a rigid body? Show that if \(\textbf X\) is fixed in some body frame, then the angular momentum \(\textbf L_{\textbf X}\) of the rigid body about \(\textbf X\) is:
\[\textbf L_{\textbf X}=\mathcal I_{\textbf X}\boldsymbol{\omega}\]
where the inertia tensor \(\mathcal I_{\textbf X}\) of the rigid body with respect to \(\textbf X\) is:
\[\mathcal I_{\textbf X}=\iiint_{\textbf x\in\text{rigid body}} d^3\textbf x\rho(\textbf x)(|\textbf x-\textbf X|^21-(\textbf x-\textbf X)^{\otimes 2})\]
i.e. inner product minus outer product. Note that \(\mathcal I_{\textbf X}^T=\mathcal I_{\textbf X}\) is clearly symmetric and positive semi-definite, so has \(3\) non-negative real eigenvalues \(I^1_{\textbf X},I^2_{\textbf X},I^3_{\textbf X}\) (for a given \(\textbf X\)) and orthogonal eigenspaces defining the so-called principal axes of the rigid body (with respect to \(\textbf X\)).
Solution #\(2\): The most useful definition in this context is:
\[\textbf L_{\textbf X}:=\sum_im_i(\textbf x_i-\textbf X)\times(\dot{\textbf x}_i-\dot{\textbf X})\]
And importantly, not to be confused with:
\[\tilde{\textbf L}_{\textbf X}:=\sum_i (\textbf x_i-\textbf X)\times \textbf p_i=\sum_i m_i(\textbf x_i-\textbf X)\times\dot{\textbf x}_i\]
The point \(\textbf X\) is said to be fixed in some body frame of a rigid body iff for all \(\textbf x_i\) comprising the rigid body, one has for all time \(|\textbf x_i-\textbf X|=\text{const}\); thus, if one likes one can think of \(\textbf X\) as just another mass element comprising the rigid body, except that it is massless.
In this case, it is clearly more desirable to work with the “fully relative” angular momentum \(\textbf L_{\textbf X}\) about \(\textbf X\) rather than the “partially relative” angular momentum \(\tilde{\textbf L}_{\textbf X}\) about \(\textbf X\) as it’s only in the former case that one can make use of the result \(\dot{\textbf x}_i-\dot{\textbf X}=\boldsymbol{\omega}\times(\textbf x_i-\textbf X)\) from Problem #\(1\) when \(\textbf X\) is fixed in some body frame:
\[\textbf L_{\textbf X}=\sum_i m_i(\textbf x_i-\textbf X)\times(\boldsymbol{\omega}\times(\textbf x_i-\textbf X))=\sum_im_i\left(|\textbf x_i-\textbf X|^2\boldsymbol{\omega}-((\textbf x_i-\textbf X)\cdot\boldsymbol{\omega})(\textbf x_i-\textbf X)\right)\]
where \(((\textbf x_i-\textbf X)\cdot\boldsymbol{\omega})(\textbf x_i-\textbf X)=(\textbf x_i-\textbf X)((\textbf x_i-\textbf X)\cdot\boldsymbol{\omega})=(\textbf x_i-\textbf X)((\textbf x_i-\textbf X)^T\boldsymbol{\omega})=((\textbf x_i-\textbf X)\textbf (\textbf x_i-\textbf X)^T)\boldsymbol{\omega}=(\textbf x_i-\textbf X)^{\otimes 2}\boldsymbol{\omega}\), so the result follows.
Problem #\(3\): Repeat Problem #\(2\) but for the kinetic energy \(T_{\textbf X}\) of a rigid body about a point \(\textbf X\) fixed in some body frame to show that:
\[T_{\textbf X}=\frac{1}{2}\boldsymbol{\omega}\cdot\textbf L_{\textbf X}\]
Solution #\(3\): As always, it is essential to think in a clear-headed way about how various quantities are defined in the first place. In this case, there is no ambiguity (unlike the ambiguity between \(\textbf L_{\textbf X}\) and \(\tilde{\textbf L}_{\textbf X}\)), and one simply has:
\[T_{\textbf X}:=\frac{1}{2}\sum_i m_i|\dot{\textbf x}_i-\dot{\textbf X}|^2\]
In this case, \(|\dot{\textbf x}_i-\dot{\textbf X}|^2=|\boldsymbol{\omega}\times(\textbf x_i-\textbf X)|^2=|\boldsymbol{\omega}|^2|\textbf x_i-\textbf X|^2-(\boldsymbol{\omega}\cdot(\textbf x_i-\textbf X))^2=\boldsymbol{\omega}^T|\textbf x_i-\textbf X|^2\boldsymbol{\omega}-\boldsymbol{\omega}^T(\boldsymbol{\omega}\cdot(\textbf x_i-\textbf X))(\textbf x_i-\textbf X)\) and the rest is straightforward.
Problem #\(4\): In any frame, the decompositions:
\[\textbf L=M\textbf X\times\dot{\textbf X}+\textbf L_{\textbf X}\]
and
\[T=\frac{1}{2}M|\dot{\textbf X}|^2+T_{\textbf X}\]
are true only for what point \(\textbf X\)? (note these decompositions are true not just for rigid bodies).
Solution #\(4\): Only when \(\textbf X\) coincides with the center of mass of the system as this ensures that cross-terms such as \(\sum_im_i(\textbf x_i-\textbf X)=\sum_im_i(\dot{\textbf x}_i-\dot{\textbf X})=\textbf 0\) vanish.
Problem #\(5\): Define the external torque \(\boldsymbol{\tau}_{\textbf X}^{\text{ext}}\) about \(\textbf X\) and, using this definition, check under \(2\) assumptions (which should be stated) that \(\dot{\textbf L}_{\textbf X}=\boldsymbol{\tau}_{\textbf X}^{\text{ext}}\) (again, this result is true not just for rigid bodies).
Solution #\(5\): The sensible definition in this case is:
\[\boldsymbol{\tau}_{\textbf X}^{\text{ext}}:=\sum_i(\textbf x_i-\textbf X)\times\textbf F_i^{\text{ext}}=\boldsymbol{\tau}^{\text{ext}}-\textbf X\times\textbf F_{\text{ext}}\]
Now the first assumption is that \(\textbf X\) coincides with the center of mass of the system. This allows the decomposition of \(\textbf L\) in Problem #\(4\) to be used, in particular:
\[\dot{\textbf L}_{\textbf X}=\dot{\textbf L}-M\textbf X\times\ddot{\textbf X}\]
Now comes the second assumption, namely that one is working in an inertial frame. This allows one to replace \(\dot{\textbf L}=\boldsymbol{\tau}^{\text{ext}}\) and \(M\ddot{\textbf X}=\textbf F^{\text{ext}}\). The claim follows.
Problem #\(5\): Synthesizing the results of the previous few problems, derive Euler’s equations for rigid body rotation about the center of mass \(\textbf X\) in an inertial frame:
\[\mathcal I_{\textbf X}\dot{\boldsymbol{\omega}}+\boldsymbol{\omega}\times\textbf L_{\textbf X}=\boldsymbol{\tau}^{\text{ext}}_{\textbf X}\]
Solution #\(5\): The simple but important observation to make is that the center of mass \(\textbf X\) is also always fixed in any body frame (rigorous proof?). So conceptually, Euler’s equations are simply obtained by applying the product rule to:
\[\dot{\textbf L}_{\textbf X}=\frac{d}{dt}(\mathcal I_{\textbf X}\boldsymbol{\omega})=\dot{\mathcal I}_{\textbf X}\boldsymbol{\omega}+\mathcal I_{\textbf X}\dot{\boldsymbol{\omega}}\]
except that it isn’t so obvious how to simplify \(\dot{\mathcal I}_{\textbf X}\) from its definition in Problem #\(2\). So instead, it will be convenient to choose a specific basis to carry out the computation in, and then revert back to the general vector notation. Specifically, the algebra is dramatically simplified in the principal body frame \((\hat{\textbf e}_1,\hat{\textbf e}_2,\hat{\textbf e}_3)_{\textbf X}\) with respect to which \(\mathcal I_{\textbf X}\) about the center of mass \(\textbf X\) is diagonal \(\mathcal I_{\textbf X}=\sum_{i=1}^3I_{\textbf X}^i\hat{\textbf e}_i^{\otimes 2}\) and moreover the principal moments of inertia \(I^1_{\textbf X},I^2_{\textbf X},I^3_{\textbf X}\) are \(t\)-independent. In this \(\mathcal I_{\textbf X}\)-eigenbasis, one can express \(\boldsymbol{\omega}=\sum_{i=1}^3\omega_i\hat{\textbf e}_i\) and hence \(\textbf L_{\textbf X}=\sum_{i=1}^3I^i_{\textbf X}\omega_i\hat{\textbf e}_i\), so applying the product rule gives:
\[\dot{\boldsymbol{\omega}}=\sum_{i=1}^3(\dot{\omega}_i\hat{\textbf e}_i+\omega_i\boldsymbol{\omega}\times\hat{\textbf e}_i)=\sum_{i=1}^3\dot{\omega}_i\hat{\textbf e}_i+\boldsymbol{\omega}\times\boldsymbol{\omega}=\sum_{i=1}^3\dot{\omega}_i\hat{\textbf e}_i\]
\[\dot{\textbf L}_{\textbf X}=\sum_{i=1}^3(I^i_{\textbf X}\dot{\omega}_i\hat{\textbf e}_i+I^i_{\textbf X}\omega_i\boldsymbol{\omega}\times\hat{\textbf e}_i)=\mathcal I_{\textbf X}\dot{\boldsymbol{\omega}}+\boldsymbol{\omega}\times\textbf L_{\textbf X}\]
Problem #\(6\): What does it mean for a rigid body to be free? Verify explicitly that both the kinetic energy \(T_{\textbf X}\) and magnitude of the angular momentum \(|\textbf L_{\textbf X}|\) are conserved for a free rigid body.
Solution #\(6\): A rigid body is said to be free iff it experiences no net external torque \(\boldsymbol{\tau}^{\text{ext}}_{\textbf X}=\textbf 0\) about its center of mass \(\textbf X\) in an inertial frame so that \(\textbf L_{\textbf X}\) is immediately conserved (and thus so is \(|\textbf L_{\textbf X}|\)). Moreover, because the inertia tensor is symmetric:
\[\dot T_{\textbf X}=\frac{1}{2}\dot{\boldsymbol{\omega}}\cdot\textbf L_{\textbf X}=\frac{1}{2}\textbf L_{\textbf X}\cdot\dot{\boldsymbol{\omega}}=\frac{1}{2}(\mathcal I_{\textbf X}\boldsymbol{\omega})\cdot\dot{\boldsymbol{\omega}}=\frac{1}{2}(\mathcal I_{\textbf X}\boldsymbol{\omega})^T\dot{\boldsymbol{\omega}}=\frac{1}{2}\boldsymbol{\omega}^T\mathcal I_{\textbf X}\dot{\boldsymbol{\omega}}=0\]
vanishes by virtue of dotting Euler’s equations with \(\boldsymbol{\omega}\).
Problem #\(7\): Describe Poinsot’s construction for visualizing the rotational dynamics of an arbitrary free rigid body.
Solution #\(7\): The idea is to first go to the principal body frame where one has (simplifying the notation on the principal moments of inertia a bit from earlier):
\[T_{\textbf X}=\frac{1}{2}I_1\omega_1^2+\frac{1}{2}I_2\omega_2^2+\frac{1}{2}I_3\omega_3^2\]
\[|\textbf L_{\textbf X}|^2=I_1^2\omega_1^2+I_2^2\omega_2^2+I_3^2\omega_3^2\]
Thanks to Problem #\(6\), it follows that the angular velocity \(\boldsymbol{\omega}=\sum_{i=1}^3\omega_i\hat{\textbf e}_i\) is constrained to lie on a closed loop intersection of these two ellipsoids; it is common to visualize the first one (called the inertia ellipsoid) defined by the conserved kinetic energy \(T_{\textbf X}\) as embedded in the principal body frame of the rigid body so that the aforementioned closed loop on which \(\boldsymbol{\omega}\) travels is viewed as a trajectory (called the polhode) on the inertia ellipsoid.
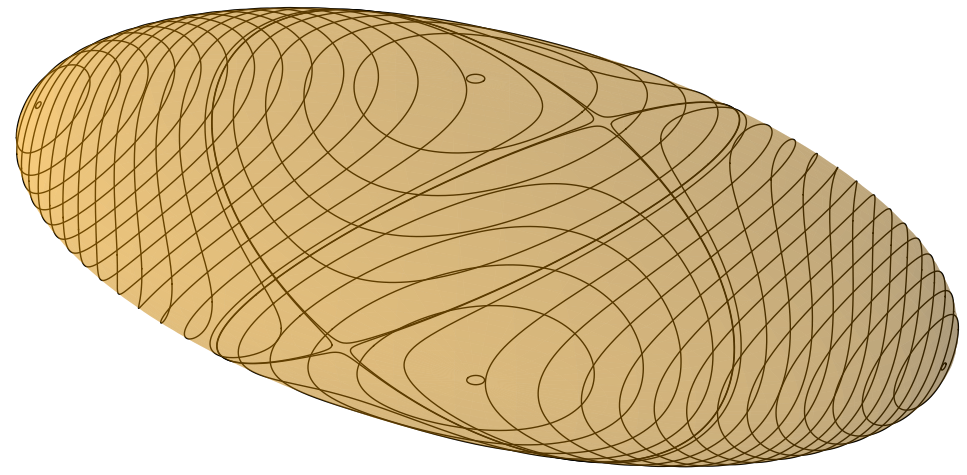
So far this is just in the (principal) body frame, but in practice one is interested in how the rotation looks like in the inertial lab frame. For this, the key observation is that, reverting back to the vector notation, because \(T_{\textbf X}=\boldsymbol{\omega}\cdot\textbf L_{\textbf X}/2\) defines the equation of a plane in \(\boldsymbol{\omega}\)-space with normal vector \(\textbf L_{\textbf X}\), called the invariable plane; this also explains why one typically emphasizes the inertia ellipsoid over the “angular momentum ellipsoid”, since one thus has the nice interpretation that the inertia ellipsoid is tangent to the invariable plane at \(\boldsymbol{\omega}\), a fact which is confirmed by the gradient \(\partial T_{\textbf X}/\partial\boldsymbol{\omega}=\textbf L_{\textbf X}\) being orthogonal to contour surfaces. In the inertial lab frame, \(\boldsymbol{\omega}\) thus traces out a (not necessarily closed) trajectory called the herpolhode on the invariable plane as the inertia ellipsoid rolls without slipping on it (this is because, from the earlier rigid body kinematic formula \(\dot{\textbf x}_i-\dot{\textbf x}_j=\boldsymbol{\omega}\times(\textbf x_i-\textbf x_j)\), if one choose \(\textbf x_i\) to be the point of contact of the inertia ellipsoid with the invariable plane and \(\textbf x_j:=\textbf X\) the center of mass/center of the ellipsoid, then clearly \(\boldsymbol{\omega}\) is parallel to \(\textbf x_i-\textbf X\) and so the cross product vanishes, so \(\dot{\textbf x}_i=\dot{\textbf X}=\textbf 0\) which is the definition of rolling without slipping).
An important conceptual association to make:
\[\text{Polhode}\Leftrightarrow\text{Body Frame}\]
\[\text{Herpolhode}\Leftrightarrow\text{Lab Frame}\]
Another comment to make about Poinsot’s construction is that in some sense any free rigid body, no matter how jagged or complicated of an asteroid it is, can always be reduced to an ellipsoid with the same principal axes and moments of inertia; the \(2\) are kinematically indistinguishable but the latter has the advantage of being easier to interpret in terms of Poinsot’s construction. And clearly, understanding how the ellipsoid moves is equivalent to understanding how the principal axes of the original rigid body are rotating, which is all one could ask for to claim one has fully understood the dynamics of the rigid body!!! Systematically:
Step #\(1\): Mentally replace the rigid body by its inertia ellipsoid.
Step #\(2\): Figure out what the conserved \(\textbf L_{\textbf X}\) is; its magnitude determines the polhode on the inertia ellipsoid while its direction determines the invariable plane.
Step #\(3\): Keeping the invariable plane fixed in the lab frame, visualize the ellipsoid rolling without slipping on it along its polhode.
Step #\(4\): Now, optionally, get rid of the inertia ellipsoid as it was just a mental crutch and put the original rigid body back…but now it’s clear what it’s doing!
Here are some animations showing Poinsot’s construction for a particular free, asymmetric top with \(I_1\neq I_2\neq I_3\neq I_1\) varying the choice of \(\textbf L_{\textbf X}\), viewed in the lab frame


Problem #\(8\): State and explain intuitively the intermediate axis theorem (variously known as the tennis racket theorem or Dzhanibekov effect).
Solution #\(8\): For a free, asymmetric top (such as in the animations above), rotation about the principal axes \(\hat{\textbf e}_1\) and \(\hat{\textbf e}_3\) are stable, but rotation about \(\hat{\textbf e}_2\) is unstable. Although one can mathematically deduce it by linearizing, it also follows by inspecting the topology of the polhodes on the inertia ellipsoid for the asymmetric top (see also this nice qualitative explanation due to Terence Tao based on centrifugal force arguments in a rotating frame and video by Veritasium where it is explained that such a dramatic “flip” will not occur for the Earth by virtue of its non-rigidity which allows kinetic energy \(T_{\textbf X}\) to be dissipated internally as heat energy, thereby tending towards a minimal-energy state \(T_{\textbf X}=\sum_{i=1}^3L_i^2/2I_i\) of spinning about the principal axis with maximal moment of inertia).
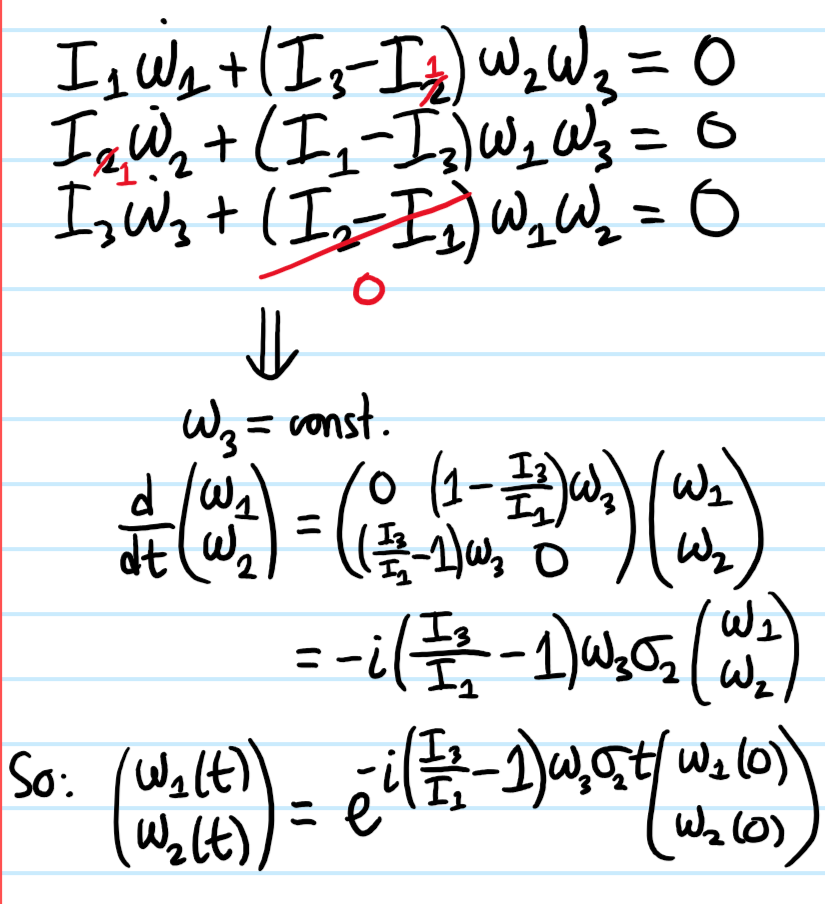
Problem #\(9\): Integrate Euler’s equations exactly for a free, symmetric top with \(I_1=I_2\).
Solution #\(9\):
Problem #\(10\): Draw a diagram defining the Euler angles and rewrite Euler’s equations in terms of the Euler angles.
Solution #\(10\): The whole point of the Euler angles is to provide a language with which someone in the inertial lab frame can begin to talk about in a quantitative manner what the rigid body is doing (Poinsot’s construction with the herpolhode and all allows a good qualitative description but it doesn’t immediately offer anything quantitative).
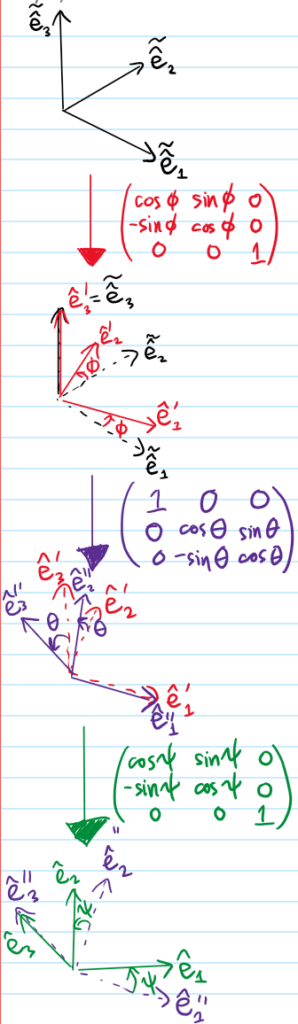
Keep in mind there are many other (\(12\) to be precise) conventions for Euler angles. The \(SO(3)\) matrices should be interpreted not as active transformations of vectors in space, but as passive transformations of the basis which is why they look the way they do, for instance the last transformation says:
\[\begin{pmatrix}\hat{\textbf e}_1\\\hat{\textbf e}_2\\\hat{\textbf e}_3\end{pmatrix}=\begin{pmatrix}\cos\phi&\sin\phi&0\\-\sin\phi&\cos\phi&0\\0&0&1\end{pmatrix}\begin{pmatrix}\hat{\textbf e}_1^{\prime\prime}\\\hat{\textbf e}_2^{\prime\prime}\\\hat{\textbf e}_3^{\prime\prime}\end{pmatrix}\]
and composing together the other \(2\) rotations, one finds that the net Euler angle rotation from the lab frame to the body frame is:
\[\begin{pmatrix}\hat{\textbf e}_1\\\hat{\textbf e}_2\\\hat{\textbf e}_3\end{pmatrix}=\begin{pmatrix}
\cos\psi\cos\phi – \cos\theta\sin\phi\sin\psi &
\sin\phi\cos\psi + \cos\theta\sin\psi\cos\phi &
\sin\theta\sin\psi \\
-\cos\phi\sin\psi – \cos\theta\cos\psi\sin\phi &
-\sin\psi\sin\phi + \cos\theta\cos\psi\cos\phi &
\sin\theta\cos\psi \\
\sin\theta\sin\phi &
-\sin\theta\cos\phi &
\cos\theta
\end{pmatrix}\begin{pmatrix}\tilde{\hat{\textbf e}}_1\\\tilde{\hat{\textbf e}}_2\\\tilde{\hat{\textbf e}}_3\end{pmatrix}\]
with the inverse of course given by transposition:
\[\begin{pmatrix}\tilde{\hat{\textbf e}}_1\\\tilde{\hat{\textbf e}}_2\\\tilde{\hat{\textbf e}}_3\end{pmatrix}=\begin{pmatrix}
\cos\psi\cos\phi – \cos\theta\sin\phi\sin\psi &
-\cos\phi\sin\psi – \cos\theta\cos\psi\sin\phi &
\sin\theta\sin\phi \\
\sin\phi\cos\psi + \cos\theta\sin\psi\cos\phi &
-\sin\psi\sin\phi + \cos\theta\cos\psi\cos\phi &
-\sin\theta\cos\phi \\
\sin\theta\sin\psi &
\sin\theta\cos\psi &
\cos\theta
\end{pmatrix}\begin{pmatrix}\hat{\textbf e}_1\\\hat{\textbf e}_2\\\hat{\textbf e}_3\end{pmatrix}\]
Problem #\(11\): In order to check that one has truly understood the Euler angles, explain what coefficient should replace each of the question marks in the linear combination below:
\[\boldsymbol{\omega}=?\tilde{\hat{\textbf e}}_3+?\hat{\textbf e}_1’+?\hat{\textbf e}_3^{\prime\prime}\]
Solution #\(11\):
\[\boldsymbol{\omega}=\dot\phi\tilde{\hat{\textbf e}}_3+\dot\theta\hat{\textbf e}_1’+\dot\psi\hat{\textbf e}_3^{\prime\prime}\]
Problem #\(12\): Hence, how are the principal body frame angular velocities \((\omega_1,\omega_2,\omega_3)\) related to the Euler angles \((\phi,\theta,\psi)\)?
Solution #\(12\): Basically, one just needs to express \(\tilde{\hat{\textbf e}}_3\) and \(\hat{\textbf e}’_1 \) in the principal body frame. Although one can basically see the answer in the bottom row of that massive matrix above, in practice to rederive it the efficient way is to just walk directly from start to destination, i.e. in the first transformation \(\tilde{\hat{\textbf e}}_3=\hat{\textbf e}_3’\), in the next transformation \(\hat{\textbf e}_3’=\sin\theta\hat{\textbf e}_2^{\prime\prime}+\cos\theta\hat{\textbf e}_3^{\prime\prime}\) and in the last transformation \(\hat{\textbf e}_3^{\prime\prime}=\hat{\textbf e}_3\) while \(\hat{\textbf e}_2^{\prime\prime}=\sin\psi\hat{\textbf e}_1+\cos\psi\hat{\textbf e}_2\) so overall:
\[\tilde{\hat{\textbf e}}_3=\sin\theta\sin\psi\hat{\textbf e}_1+\sin\theta\cos\psi\hat{\textbf e}_2+\cos\theta\hat{\textbf e}_3\]
as expected. Similarly, \(\hat{\textbf e}_1’=\hat{\textbf e}_1^{\prime\prime}=\cos\psi\hat{\textbf e}_1-\sin\psi\hat{\textbf e}_2\) and trivially \(\hat{\textbf e}_3^{\prime\prime}=\hat{\textbf e}_3\). Assembling everything, one obtains:
\[\omega_1=\dot{\phi}\sin\theta\sin\psi+\dot\theta\cos\psi\]
\[\omega_2=\dot\phi\sin\theta\cos\psi-\dot\theta\sin\psi\]
\[\omega_3=\dot\phi\cos\theta+\dot\psi\]
(and note one can of course also express the lab-frame components of \(\boldsymbol{\omega}\) in terms of the Euler angles \((\phi,\theta,\psi)\)).
Problem #\(13\): Armed with the Euler angle expressions of the angular velocity components, show for the free symmetric top (in the suggested order):
\[\dot{\theta}=0\]
\[\dot{\phi}=\frac{I_3\omega_3}{I_1\cos\theta}\]
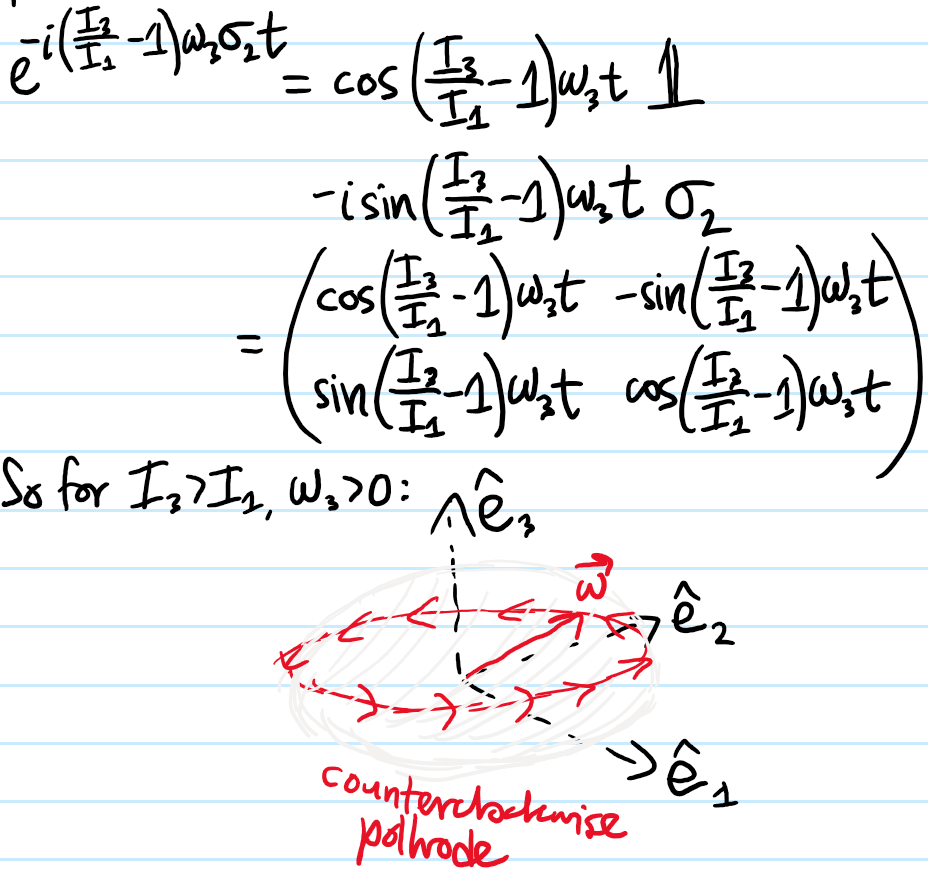
\[\dot{\psi}=\left(1-\frac{I_3}{I_1}\right)\omega_3\]
Solution #\(14\): Orienting the lab frame axes so that \(\textbf L\) lies along \(\tilde{\hat{\textbf e}}_3\), then by definition of the Euler angle \(\theta\) one has:
\[\textbf L\cdot\hat{\textbf e}_3=|\textbf L|\cos\theta=I_3\omega_3\]
But both \(\textbf L\) and \(\omega_3\) are conserved for the free symmetric top, so \(\theta\) must also be conserved, i.e. \(\dot\theta=0\). This leads to the simplifications:
\[\omega_1=\dot{\phi}\sin\theta\sin\psi\]
\[\omega_2=\dot\phi\sin\theta\cos\psi\]
So that:
\[|\textbf L|^2=I_1^2(\omega_1^2+\omega_2^2)+I_3^2\omega_3^2=I_1^2\dot{\phi}^2\sin^2\theta+I_3^2\omega_3^2=\frac{I_3^2\omega_3^2}{\cos^2\theta}\]
Rearranging leads to the desired \(\dot{\phi}=I_3\omega_3/I_1\cos\theta\). Finally, substituting this result into the remaining equation:
\[\omega_3=\dot{\phi}\cos\theta+\dot{\psi}\]
and isolating for \(\dot{\psi}=\left(1-\frac{I_3}{I_1}\right)\omega_3\) completes the proof.
Aside: one could also have started with the kinetic Lagrangian \(L=\frac{1}{2}I_1\dot{\phi}^2\sin^2\theta+\frac{1}{2}I_3(\dot{\phi}\cos\theta+\dot\psi)^2\), extracting the conserved momenta \(\partial L/\partial\dot{\phi},\partial L/\partial\dot{\psi}=I_3\omega_3\) and using the equation of motion \(\partial L/\partial\theta=0\) to quickly also obtain the results above.
Aside: a famous example of the free symmetric top considered by Richard Feynman is the case of a lamina (e.g. a plate) with \(I_1=I_2=I_3/2\) by the perpendicular axis theorem. Then in the lab frame, the precession/wobble rate \(\dot\phi\) and the spin rate \(\dot{\psi}\) are related by:
\[\dot{\phi}=-\frac{2\dot{\psi}}{\cos\theta}\]
In particular, when the nutation angle is very slight \(\theta\ll 1\), it follows that:
\[\dot{\phi}\approx -2\dot{\psi}\]
so the lamina wobbles twice as fast as it spins, for small inclinations.
Problem #\(14\): The previous problems have all dealt with free rigid bodies. However, one can also consider a rigid body which is not free, being subject to an external torque \(\boldsymbol{\tau}_{\textbf X}^{\text{ext}}\). As an example, instead of a free symmetric top, consider a heavy symmetric top (e.g. a gyroscope) acted upon by a gravitational torque. Show that, just as there can be torque-free precession (Problem #\(9\)), there can also be torque-induced precession (in order to be able to do this problem, one absolutely requires the Euler angles in Solution #\(12\); thus, this just emphasizes again the point of Euler angles being to provide a language for discussing rigid body rotation in the lab frame).
Solution #\(14\):
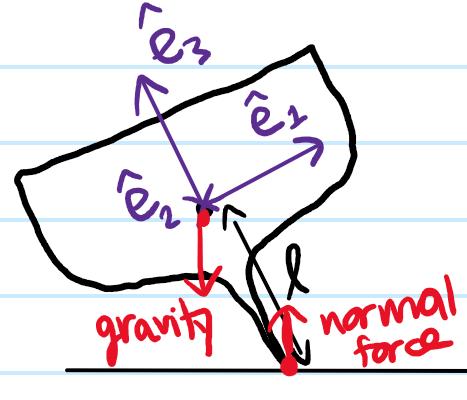
The couple from gravity and the normal force is perfectly okay, but hard to express in the body frame? And also, I’m pretty sure the top will spin with its C.o.M fixed in the lab frame (rather than being pinned at the point of contact)? And as for the Lagrangian, just subtract \(-Mg\ell\cos\theta\), but \(\phi,\psi\) are still ignorable!